 |
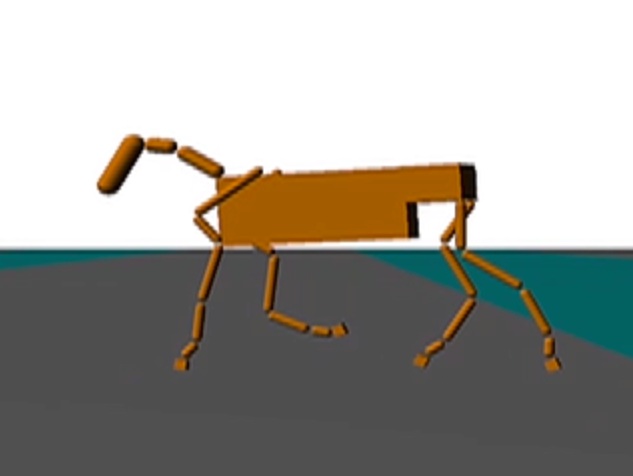
Grammatical Evolution for Gait Optimisation The experiments in this video correspond to some of the papers listed in the Publications page. The component videos are presented separately here. |
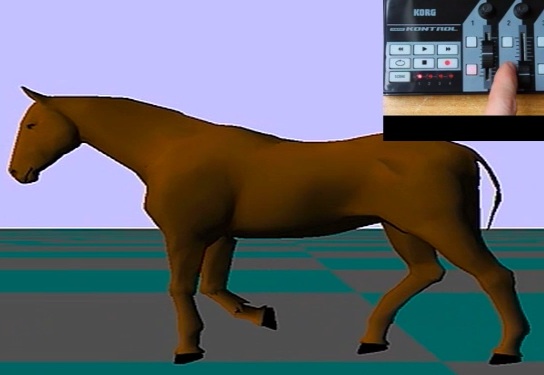 |
Kinematic Gait Transition System The system incorporates evolved motion controllers which
dynamically adjust the motion based on velocity, as specified by the
user through a MIDI controller. |
 |
Plant Spread Simulator The Plant Spread Simulator (PSS) is used to predict the spread
of invasive plants (specifically Gunnera
tinctoria). It can also be used for designing and testing
complex plant management protocols and simulating the influence of
environmental factors
such as climate change. The video shows
simulated spread from a single source over a century; the
results closely match real-world data. |
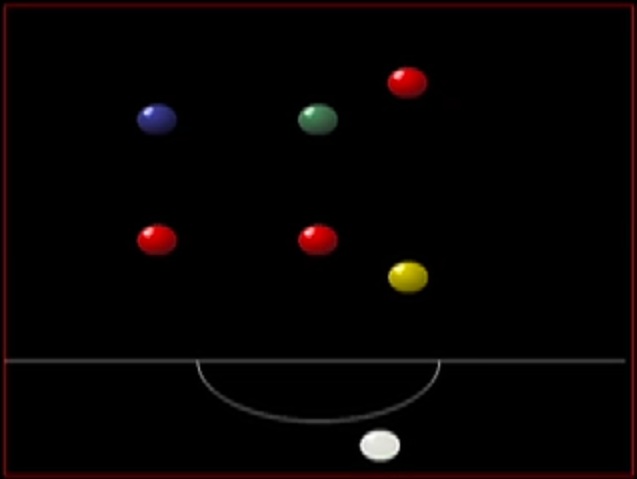 |
DrumBalls When a red or white 'sounder' ball strikes a coloured 'drum' ball, a drum sound is played. GE was used to evolve ball motion patterns to generate some input rhythm. The motion of the balls is determined by a simplistic 2D physics engine implemented in Java. |
 |
Hamster Run |
 |
Efficient Terrain Rendering from DEMs The project investigated efficient terrain rendering
techniques for
digital elevation models (DEMs). As efficiency is a very important
aspect for
the interactive visualisation of large-scale digital elevation models,
this project demonstrated some efficient terrain rendering techniques
in the form of a simple flight simulator. The video demonstrates a
technique for controlling the level of triangle mesh simplification as
the viewer flies over a model of mainland Europe. |